Physique-Chimie 2de
Rejoignez la communauté !
Co-construisez les ressources dont vous avez besoin et partagez votre expertise pédagogique.
Mes Pages
1. Constitution et transformations de la matière
Ch. 1
Identification des espèces chimiques
Ch. 2
Composition des solutions aqueuses
Ch. 3
Dénombrer les entités
Ch. 4
Le noyau de l’atome
Ch. 5
Le cortège électronique
Ch. 6
Stabilité des entités chimiques
Ch. 7
Modélisation des transformations physiques
Ch. 8
Modélisation des transformations chimiques
Ch. 9
Synthèse de molécules naturelles
Ch. 10
Modélisation des transformations nucléaires
2. Mouvement et interactions
Ch. 11
Décrire un mouvement
Ch. 12
Modéliser une action sur un système
Ch. 13
Principe d’inertie
3. Ondes et signaux
Ch. 14
Émission et perception d’un son
Ch. 15
Analyse spectrale des ondes lumineuses
Ch. 16
Propagation des ondes lumineuses
Ch. 17
Signaux et capteurs
Méthode
Fiches méthode
Fiches méthode compétences
Annexes
Chapitre 17
Activité 1 - Activité découverte
Découverte d'un robot piloté par Arduino
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Problématique de l'activité
Le robot d'exploration permet d'explorer des endroits hostiles ou difficiles d'accès pour l'Homme en se déplaçant sans aide humaine.
Quels sont les capteurs nécessaires pour permettre le déplacement autonome
du robot ?
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Comment un petit véhicule robotisé peut-il suivre un parcours prédéfini de manière autonome ?
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Doc. 1 Module à ultrasons HC SR-04

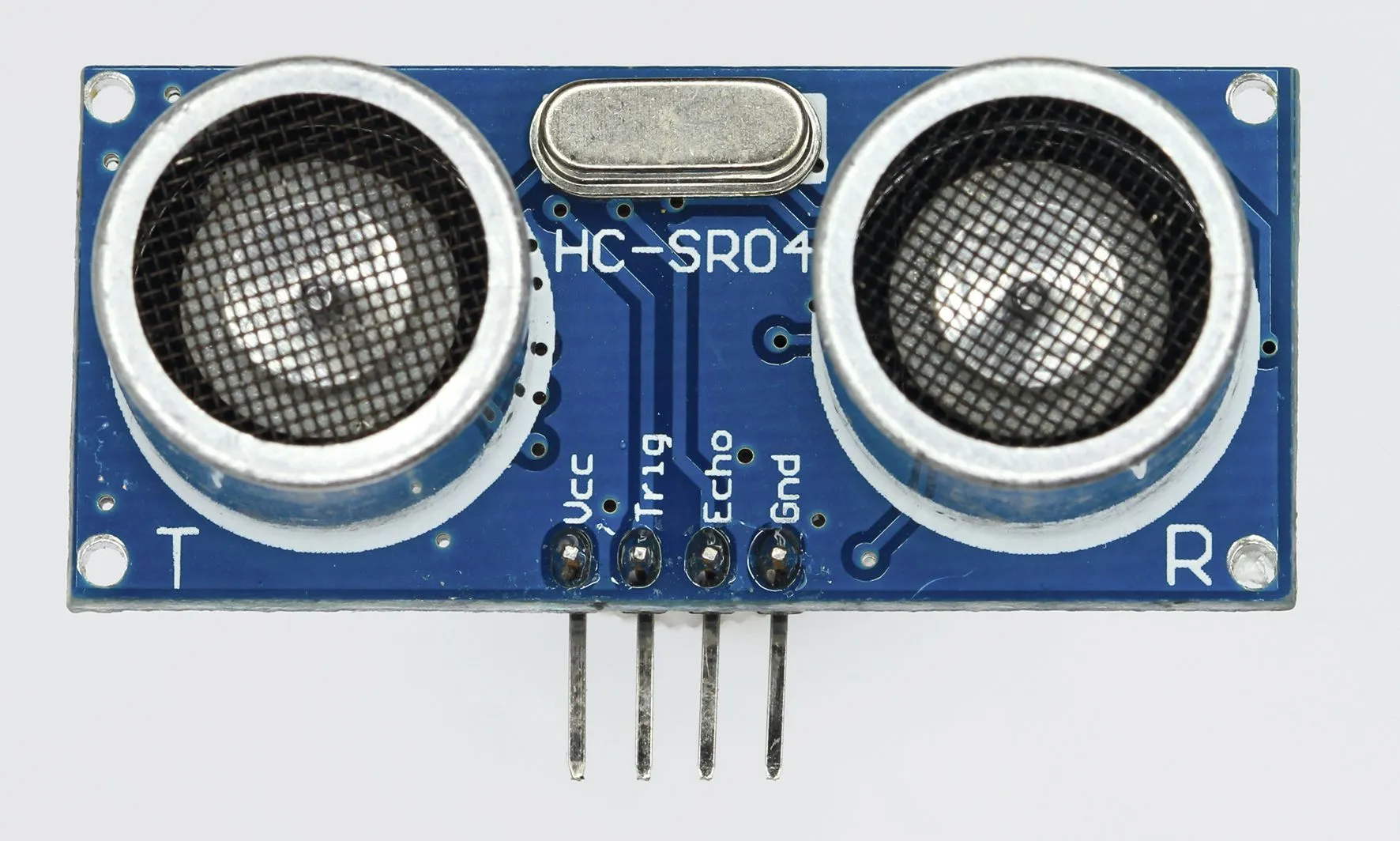
Ce module permet de mesurer la distance qui le sépare d'un obstacle. Il envoie une impulsion acoustique ultrasonore très courte d'une durée de 10 \mus et mesure la durée écoulée jusqu'à la réception d'un écho. Il se comporte donc tantôt comme émetteur, tantôt comme récepteur de l'onde sonore.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
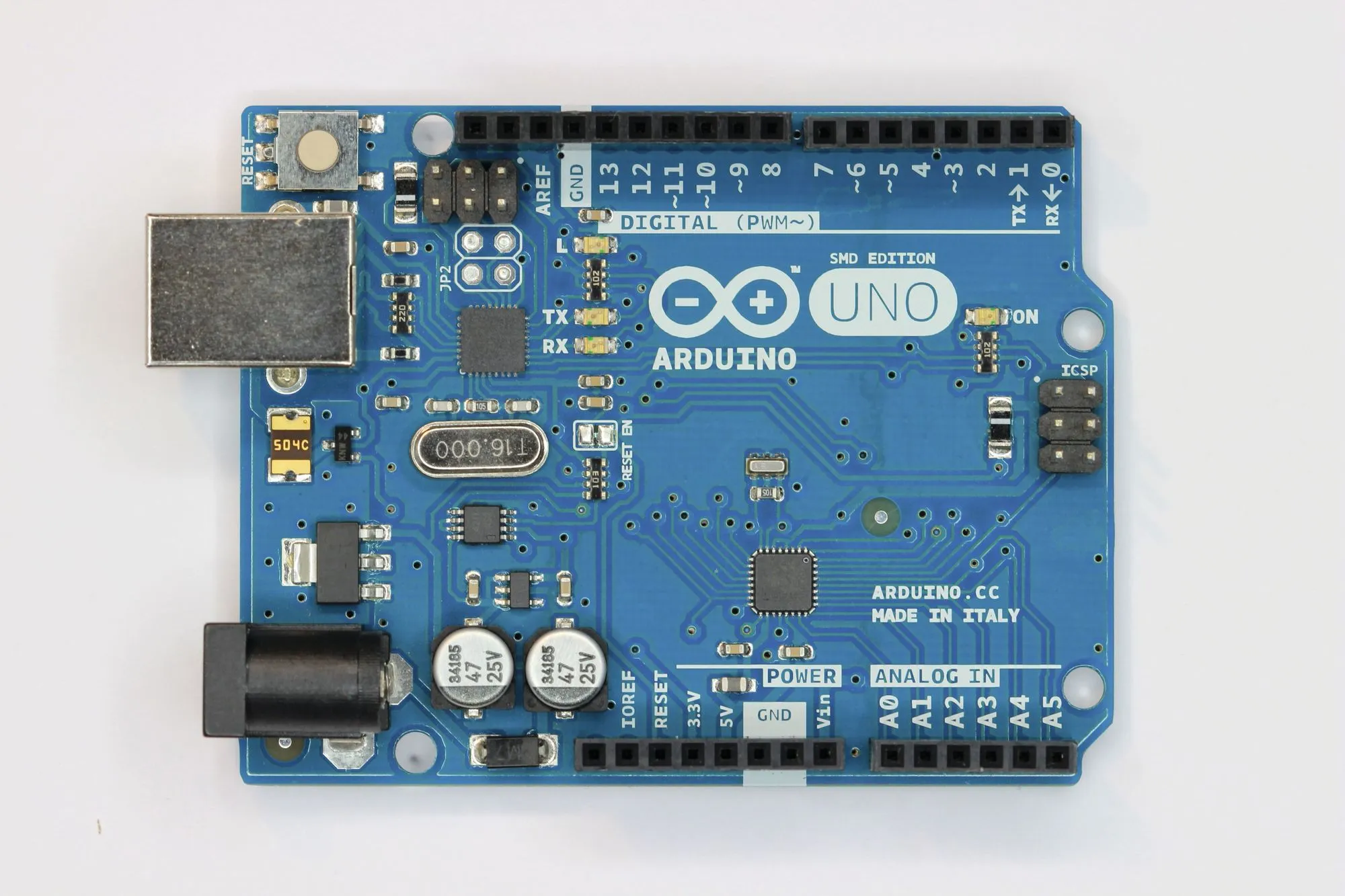
Doc. 3 Le microcontrôleur UNO

Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Doc. 2Module de suivi de ligne blanche/noire

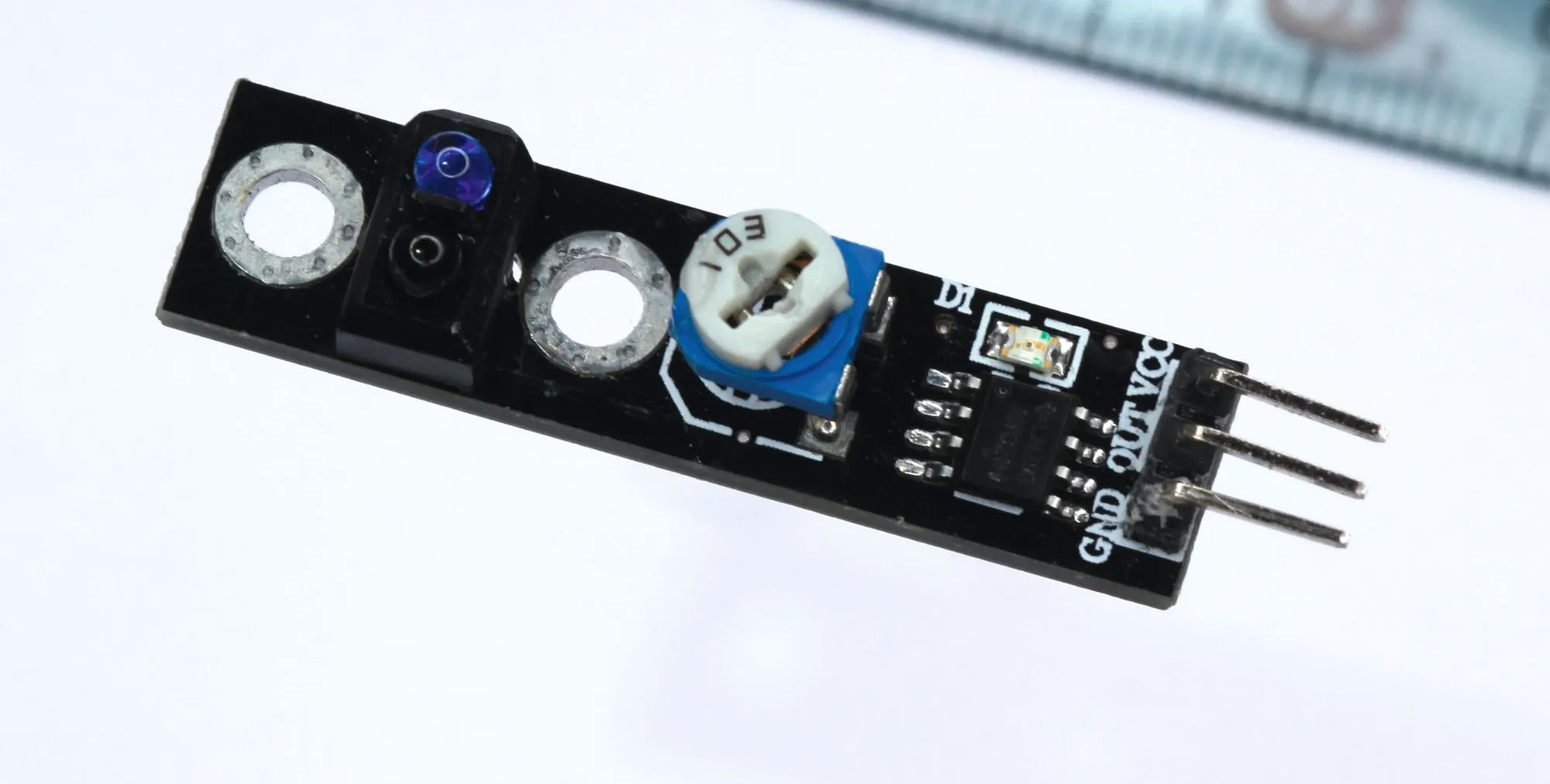
Ce module permet de détecter une ligne blanche (ou noire, selon son paramétrage) sur le sol. Il doit être connecté à une des entrées numériques d'un microcontrôleur Arduino.

Le module délivre une tension électrique qui dépend de la couleur du sol : 0 V (état bas, ligne noire) ou 5 V (état haut, ligne blanche). Pour fonctionner, ce capteur doit être connecté ainsi :
- la borne V+ doit être connectée à une tension constante de +5 V ;
- la borne S (pour SIGNAL) doit être connectée à une entrée numérique du microcontrôleur ;
- la borne G doit être connectée à une masse (référence zéro volt ou GND, GROUND).
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Questions
Compétence(s)
APP : Extraire l'information utile sur des supports variés
1. Doc. 1 Expliquer à l'aide d'un schéma le trajet suivi par l'onde ultrasonore, une fois émise par l'émetteur à ultrasons du capteur HC SR-o4.
Cliquez pour accéder à une zone de dessin
2. Doc. 2 Le robot suit une ligne blanche dessinée sur le sol. Quelle est la valeur de la tension électrique délivrée par le module de suivi de ligne blanche ? Que va-t-il se passer lorsque le robot va rencontrer une ligne noire sur le sol ?
3. Doc. 3 Indiquer comment brancher sur le microcontrôleur les trois connecteurs du module de suivi de ligne blanche en utilisant l'entrée numérique n° 8 (DIGITAL).
Retrouvez .
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Synthèse de l'activité
Quels sont les deux capteurs nécessaires au robot pour lui assurer un déplacement autonome ?
Une erreur sur la page ? Une idée à proposer ?
Nos manuels sont collaboratifs, n'hésitez pas à nous en faire part.
j'ai une idée !
Oups, une coquille
